Här kommer inom kort information om de olika projekt vi jobbat genom åren. Bland annat vår fina turbiditetsmätare som man använder för att mäta grumligheten i en vätska.
ROVer och AUVer
Vi startade vår science-club i februari 2016 då vi hade fått medel att bygga två stycken undervattensfarkoster, ROVer. Dessa kommer från OpenROV och kom som byggsatser som krävde en hel del kunskaper om allt ifrån lödning och elektronik till mekanik, tryck och vattentätning.

Sammanlagt har vi byggt tre stycken ROVer med framgång och vi har lärt oss väldigt mycket på detta.
Att vi sedan upptäckte AUVer, var kanske inte så konstigt. En AUV är en automatisk (förprogrammerad) undervattensfarkost (Autonomous Underwater Vehicle). I ett samarbete med Inspiria och Innovatum kunde vi låta en grupp ungdomar från Gullmarsgymnasiet och Fredrikstad i Norge bygga fungerande modeller av riktiga AUVer som används av forskare runt om i världen.

Bygg och programmera
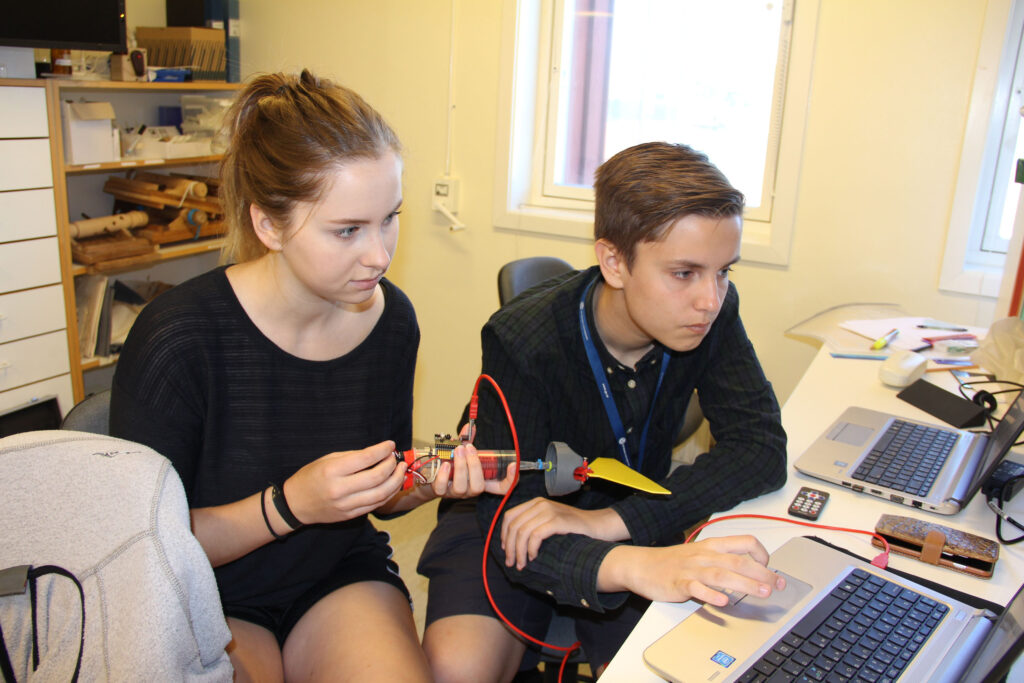
När man kommer till vår science-club behöver man inte ha en massa förkunskaper. Vi lär tillsammans och undersöker och utvecklar allteftersom. Bland annat har vi lärt oss grunderna i programmering genom Arduinos startkit. Dessa startkit har vi sedan kombinerat med enkla motorkort och komponenter för att bygga små robotbilar.
Vi tycker att det är fantastiskt roligt att kunna programmera och styra fysiska objekt och små robotbilar är utmärkta exempel på detta.